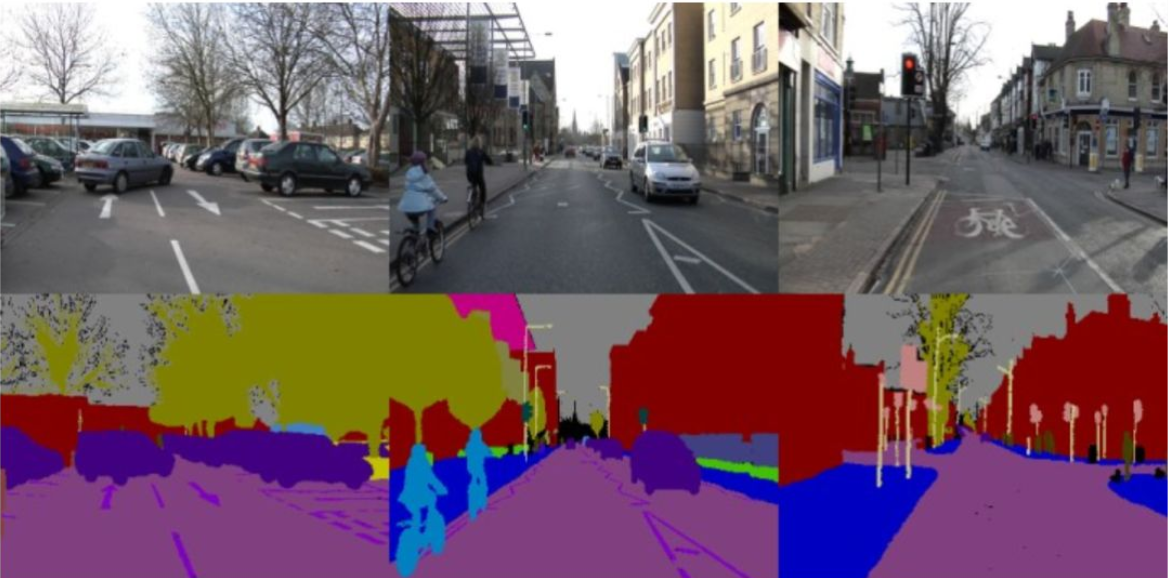
语义分割是计算机视觉领域的关键问题之一,是在像素级别上进行的分类,属于同一类的像素都要被归为一类。越来越多的应用,如自动驾驶汽车、人机交互、虚拟现实等,通过语义分割,从图像中获取信息。随着深度学习的普及,卷积神经网络等结构被应用于语义分割问题,显著提高了精度和计算效率。
本案例使用以Resnet101为主干网络的DeepLabV3模型,对图像进行语义分割,来介绍语义分割的流程和思想。
1 数据集简介¶
本案例采用的DeepLabV3模型,已经在COCO Train 2017数据集中的一个子集上进行了训练。该子集包含20个可以检测的类别,与Pascal VOC数据集中的20个类别一致。如自行车、鸟、船、狗、沙发等类别。
数据集中的图像包含不同角度、不同形态的各类别物体。数据集中已经标注出20类物体,并注明其所属的类别,便于进行语义分割。
2 DeepLabV3模型介绍¶
DeepLabV3模型是利用深度学习网络进行语义分割的模型。其核心是ASPP网络(Atrous Spatial Pyramid Pooling)。ASPP网络是带有空洞卷积的空间金字塔结构。在进行语义分割时,被检测物体往往尺度不相同。解决这一问题的一种方法是,在进行语义分割时,先通过卷积神经网络检测出物体,再对物体的大小进行缩放,最后融合。但这种方式的计算量较大。ASPP网络既能够得到多尺度的物体的信息,计算量也相对较小。
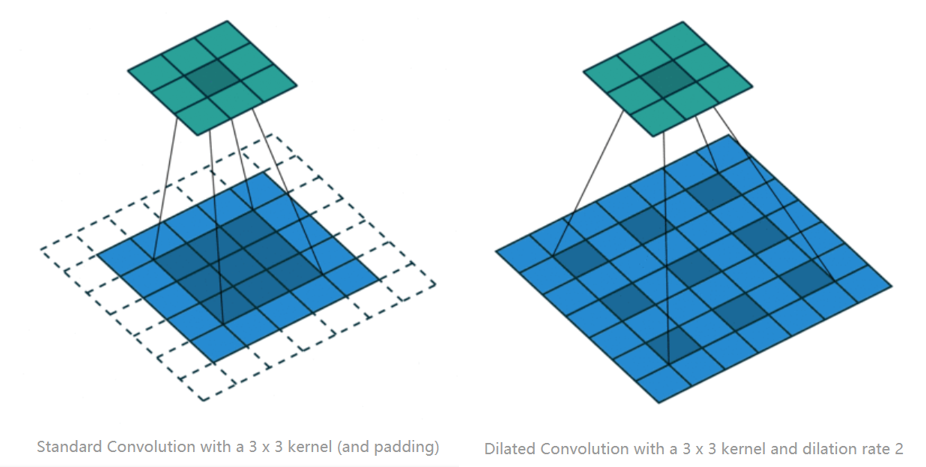
首先介绍空洞卷积的思想。如下图所示,相对于普通的卷积核,空洞卷积核通过对输入等间隔采样,可以在不增加计算量的情况下,增大卷积核的感受野。
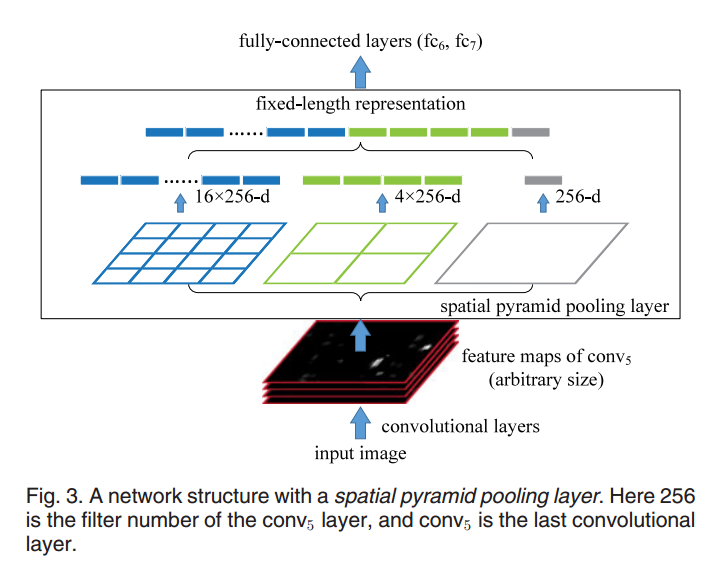
空间金字塔网络(SPP-Net)和空洞卷积构成了ASPP网络结构,SPP网络结构的目的是为了获得不同尺度的物体的特征。
因为卷积神经网络中的全连接层,要求训练和测试时输入的数据维度一致,一种方式即之前所述的改变图像大小,但是计算量大,且会丢失图像信息。SPP网络可以输入不同大小的图像,并将其特征转换为同一大小输入进全连接层。
转换的方式如下图,不同尺度的数据传入卷积层,得到不同尺度的特征图。将特征图同时传入池化核不相同的三种池化层,融合三个池化层的输出数据,作为特征,传入全连接层。通过这一方式,不同尺度的图像,传入全连接层的特征图大小一致。
# 导入需要的库
from torchvision import models
import torchvision.transforms as T
from PIL import Image
import matplotlib.pyplot as plt
import torch
import cv2
import numpy as np
接下来,通过设定pretrained=True和调用eval()函数,加载预训练模型进行语义分割测试。
# 读取DeepLabV3模型
dlab = models.segmentation.deeplabv3_resnet101(pretrained=True).eval()
3 数据预处理¶
首先读取数据,我们加载一幅包含盆栽的图片,盆栽是模型可识别的20个类别之一。
# 读取RGB图像数据
img = Image.open('./input/green.jpg').convert('RGB')
plt.imshow(img)
plt.show()

在使用DeepLabV3模型得到图像的语义分割图前,我们需要对输入图像进行数据预处理,使得图像转换为模型需要的输入数据的格式。
模型需要输入的图像格式为:三通道图像;至少为$224 \times 224$像素;并选择大型数据库ImageNet中图像的平均值和标准差为参数,对输入图像进行归一化操作。
归一化不改变图像的信息,将像素值的取值范围从[0,255]转变为[0,1]。归一化操作可以加快训练网络的收敛性;因为神经网络是以样本出现概率来进行训练和预测的,归一化到[0,1]范围可以统一样本的统计概率分布。
mean = [0.485, 0.456, 0.406]
std = [0.229, 0.224, 0.225]
trf = T.Compose([T.Resize(256), # 将图像变为256×256大小
T.CenterCrop(224), # 将图像从中心剪裁为224×224大小
T.ToTensor(), # 数据转化为Tensor格式
T.Normalize(mean = [0.485, 0.456, 0.406],
std = [0.229, 0.224, 0.225])])
# 对图像进行归一化处理
此外,因为模型是分批次进行训练和预测数据。因此输入数据的格式为:$[N_{i}\times C_{i}\times H_{i} \times W_{i} ]$
- $N_{i}$:批次的数量(batch size)
- $C_{i}$: 图像的通道数,本案例使用RGB图像,通道数为3
- $H_{i}$:图像的高
- $W_{i}$:图像的宽
我们需要通过unsqueeze函数,将单张图像的三维数据,转化为四维数据,即添加一个维度的数据,代表1个批次。
# 转化为四维数据
inp = trf(img).unsqueeze(0)
out = dlab(inp)['out']
print ("输出数据的维度",out.shape)
输出数据out储存着图像中每一个通道的像素值属于21类物体(20类物体及1个背景类)的概率。我们使用argmax函数,找到概率值最大的类别,判定该像素最可能属于该类物体。以此判断该图像中包含哪一类物体。
om = torch.argmax(out.squeeze(), dim=0).detach().cpu().numpy()
print("输出图像的大小",om.shape)
print("图像中包含的类别",np.unique(om))
np.unique(om)值为[0,16],代表图像包含背景类(用数字0表示),和第16类物体,即“盆栽”。
4.2 语义分割结果可视化¶
接下来我们将语义分割的结果进行可视化,更加直观地判断分割的效果。
语义分割是像素级的分割,模型已经判断出每个像素属于哪一类物体。因此,我们对属于同一类别的像素赋予同种颜色,即可进行展示。
# 储存不同类别对应的颜色
label_colors = np.array([(0, 0, 0), # 0=background
# 1=aeroplane, 2=bicycle, 3=bird, 4=boat, 5=bottle
(128, 0, 0), (0, 128, 0), (128, 128, 0), (0, 0, 128), (128, 0, 128),
# 6=bus, 7=car, 8=cat, 9=chair, 10=cow
(0, 128, 128), (128, 128, 128), (64, 0, 0), (192, 0, 0), (64, 128, 0),
# 11=dining table, 12=dog, 13=horse, 14=motorbike, 15=person
(192, 128, 0), (64, 0, 128), (192, 0, 128), (64, 128, 128), (192, 128, 128),
# 16=potted plant, 17=sheep, 18=sofa, 19=train, 20=tv/monitor
(0, 64, 0), (128, 64, 0), (0, 192, 0), (128, 192, 0), (0, 64, 128)])
# 属于同一类别的像素,具有相同的颜色
def decode_segmap(image,label_colors, nc=21):
# 三张灰度图像,储存三通道的像素值
r = np.zeros_like(image).astype(np.uint8)
g = np.zeros_like(image).astype(np.uint8)
b = np.zeros_like(image).astype(np.uint8)
for l in range(0, nc):
idx = image == l
r[idx] = label_colors[l, 0]
g[idx] = label_colors[l, 1]
b[idx] = label_colors[l, 2]
# 将三张灰度图像组成RGB图像
rgb = np.stack([r, g, b], axis=2)
return rgb
绘制的结果如下图所示,绿色区域对应的是图像中的“盆栽”,黑色部分为背景类。
rgb = decode_segmap(om,label_colors)
plt.imshow(rgb)
plt.axis('off')
plt.show()

5 前景分割¶
按照上述语义分割的思想,我们也可以对图像进行前景分割。前景分割指,计算机从一幅图片中判断出哪个是前景物体,哪个是背景物体,并从中分割出感兴趣的前景关键物体。我们选择一张包含羊的图像:
img = Image.open('./input/sheep.jpg').convert('RGB')
plt.imshow(img)
plt.axis('off')
plt.show()

首先对图像进行语义分割,操作步骤与上述一致,输出包含语义分割结果的变量rgb。其中图像类别为[0,17],说明图像包含背景类和第17类物体“羊”。
# 转化为四维数据
inp = trf(img).unsqueeze(0)
out = dlab(inp)['out']
print ("输出数据的维度",out.shape)
om = torch.argmax(out.squeeze(), dim=0).detach().cpu().numpy()
print("输出图像的大小",om.shape)
print("图像中包含的类别",np.unique(om))
rgb = decode_segmap(om,label_colors)
之后,我们利用语义分割得到的数据,对图像进行前景分割。首先复制原图像,将其储存在foreground变量中,并将其转换为与语义分割输出数据大小一致的图像,即$224 \times 224$。
# 读取数据
foreground = cv2.imread("./input/sheep.jpg")
# 转化为RGB图像格式
foreground = cv2.cvtColor(foreground,cv2.COLOR_BGR2RGB)
# 修改图像大小
r = np.zeros_like(om).astype(np.uint8)
foreground = cv2.resize(foreground,(r.shape[1],r.shape[0]))
现在我们定义背景图,储存在变量background中,初始情况下定义为与语义分割输出数据大小一致、像素值都为255的白色图像。
background = 255*np.ones_like(rgb).astype(np.uint8)
# 将数值转换为float格式,便于进行运算
foreground = foreground.astype(float)
background = background.astype(float)
下面我们将使用cv2.threshold函数找到图像的前景图。因为在语义分割函数中,我们设定代表背景类(即应该识别出的背景图)的颜色为黑色,像素值为0,故任何值高于0的像素点都会被认为是前景。根据语义分割的输出结果,该前景图应为羊的区域。
我们将输出结果保存为th和alpha,其中th代表判断阈值,这里应为0,用以判断像素点是否属于前景。alpha为二进制掩膜,可以看到白色部分为我们需要的前景图,黑色部分为背景图,即背景类。
gray = cv2.cvtColor(rgb,cv2.COLOR_BGR2GRAY)
th, alpha = cv2.threshold(gray,0,255, cv2.THRESH_BINARY)
alpha = cv2.cvtColor(alpha,cv2.COLOR_GRAY2RGB)
print("阈值th:", th)
plt.imshow(alpha)

接下来使用cv2.GaussianBlur函数,对掩膜进行高斯模糊,让图像的边缘更加平滑。使输出的前景图的边缘不会过于锐利。
alpha = cv2.GaussianBlur(alpha, (7,7),0)
plt.imshow(alpha)

最后,我们使用二进制掩膜alpha分离图像的前景图和背景图。将alpha中的像素值除以255,则所有的像素值在[0,1]之间,且前景图部分的值为1,背景图部分的值为0。因此,将原图像和alpha相乘,可以保留前景图部分。将白色图像background和1-alpha相乘,可以得到白色的背景图。
alpha = alpha.astype(float)/255
foreground = cv2.multiply(1.0-(alpha==0),foreground)
background = cv2.multiply(1.0-alpha,background)
outImage = cv2.add(foreground,background)
plt.imshow(outImage/255)
plt.axis('off')
plt.show()

6 总结¶
本案例介绍了如何使用以Resnet101为主干网络的DeepLabV3模型对图像进行语义分割。并使用语义分割的输出结果,对图像进行前景分割。观察输出结果,证明模型识别需要分割物体的准确率较高。